
Por favor, avalie esta postagem
A foto mostra dois protótipos de robôs montadores trabalhando, reunindo uma série de pequenas unidades, conhecidas como voxels, em uma estrutura maior. Crédito: Benjamin Jenett
Robôs montadores fazem grandes estruturas a partir de pequenas peças. Sistemas de pequenos robôs poderão algum dia construir estruturas de alto desempenho, desde aviões até assentamentos espaciais.
As aeronaves comerciais de hoje são normalmente fabricadas em seções, muitas vezes em locais diferentes – asas em uma fábrica, seções de fuselagem em outra, componentes de cauda em outra – e depois transportadas para uma fábrica central em enormes aviões de carga para montagem final.
Mas e se a montagem final fosse a única, com todo o avião construído a partir de uma grande variedade de minúsculas peças idênticas, todas montadas por um exército de minúsculos robôs?
Essa é a visão do estudante de graduação Benjamin Jenett, trabalhando com o professor Neil Gershenfeld em MITdo Centro de Bits e Átomos (CBA), vem realizando seu trabalho de tese de doutorado. Chegou-se agora ao ponto em que versões protótipo de tais robôs podem montar pequenas estruturas e até mesmo trabalhar em equipe para construir conjuntos maiores.
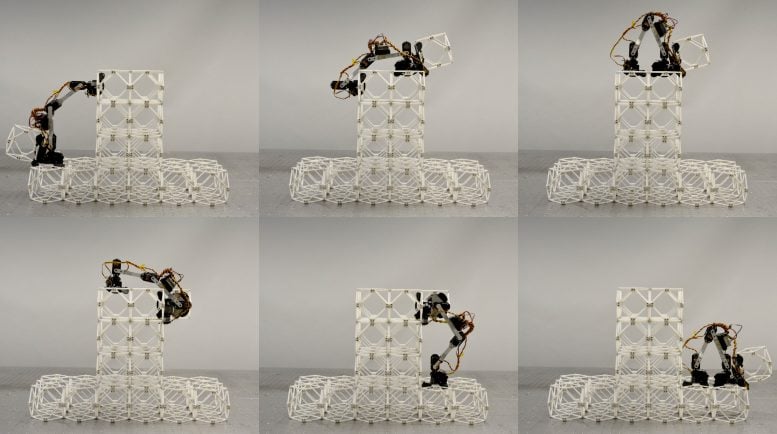
Sequência de fotos mostra um robô montador em ação, carregando uma unidade estrutural por cima e por baixo do outro lado de uma estrutura em construção. Crédito: Benjamin Jenett
O novo trabalho aparece na edição de outubro da Cartas de Robótica e Automação IEEE, em um artigo de Jenett, Gershenfeld, da colega estudante de graduação Amira Abdel-Rahman e do ex-aluno do CBA Kenneth Cheung SM '07, Ph.D. '12, que está agora em NASAdo Ames Research Center, onde lidera o projeto ARMADAS para projetar uma base lunar que possa ser construída com montagem robótica.
“Este artigo é um prazer”, diz Aaron Becker, professor associado de engenharia elétrica e de computação na Universidade de Houston, que não esteve associado a este trabalho. “Ele combina design mecânico de alto nível com demonstrações de cair o queixo, novo hardware robótico e um conjunto de simulação com mais de 100.000 elementos”, diz ele.
“O que está no cerne disso é um novo tipo de robótica, que chamamos de robôs relativos”, diz Gershenfeld. Historicamente, explica ele, existiram duas grandes categorias de robótica – aquelas feitas de componentes personalizados caros que são cuidadosamente otimizados para aplicações específicas, como montagem em fábrica, e aquelas feitas de módulos baratos produzidos em massa com desempenho muito inferior. Os novos robôs, porém, são uma alternativa a ambos. Eles são muito mais simples que os primeiros, embora muito mais capazes que os últimos, e têm o potencial de revolucionar a produção de sistemas em grande escala, desde aviões a pontes e edifícios inteiros.
Segundo Gershenfeld, a principal diferença está na relação entre o dispositivo robótico e os materiais que ele manuseia e manipula. Com estes novos tipos de robôs, “não é possível separar o robô da estrutura – eles trabalham juntos como um sistema”, diz ele. Por exemplo, embora a maioria dos robôs móveis exija sistemas de navegação altamente precisos para acompanhar a sua posição, os novos robôs montadores só precisam de saber onde estão em relação às pequenas subunidades, chamadas voxels, nas quais estão atualmente a trabalhar. Cada vez que o robô dá um passo para o próximo voxel, ele reajusta seu senso de posição, sempre em relação aos componentes específicos sobre os quais está pisando no momento.
A visão subjacente é que, assim como as imagens mais complexas podem ser reproduzidas usando um conjunto de pixels em uma tela, praticamente qualquer objeto físico pode ser recriado como um conjunto de peças tridimensionais menores, ou voxels, que podem ser feitos composto por suportes e nós simples. A equipe mostrou que esses componentes simples podem ser organizados para distribuir cargas de forma eficiente; eles são em grande parte compostos por espaços abertos para que o peso total da estrutura seja minimizado. As unidades podem ser recolhidas e colocadas uma ao lado da outra pelos simples montadores e, em seguida, fixadas entre si usando sistemas de travamento embutidos em cada voxel.
Os próprios robôs se assemelham a um pequeno braço, com dois longos segmentos articulados no meio e dispositivos para fixação nas estruturas de voxel em cada extremidade. Os dispositivos simples se movem como minhocas, avançando ao longo de uma fileira de voxels, abrindo e fechando repetidamente seus corpos em forma de V para passar de um para o outro. Jenett apelidou os pequenos robôs de BILL-E (uma homenagem ao robô do filme WALL-E), que significa Bipedal Isotropic Lattice Locomoting Explorer.
Animação do protótipo do robô montador em ação. Crédito: Benjamin Jenett
Jenett construiu várias versões dos montadores como projetos de prova de conceito, juntamente com projetos de voxel correspondentes com mecanismos de travamento para conectar ou desconectar facilmente cada um de seus vizinhos. Ele usou esses protótipos para demonstrar a montagem dos blocos em estruturas lineares, bidimensionais e tridimensionais. “Não estamos colocando precisão no robô; a precisão vem da estrutura” à medida que ela toma forma gradualmente, diz Jenett. “Isso é diferente de todos os outros robôs. Ele só precisa saber onde está o próximo passo.”
Enquanto trabalha na montagem das peças, cada um dos minúsculos robôs consegue contar seus passos na estrutura, diz Gershenfeld, que é diretor da CBA. Juntamente com a navegação, isto permite que os robôs corrijam erros em cada etapa, eliminando a maior parte da complexidade dos sistemas robóticos típicos, diz ele. “Está faltando a maioria dos sistemas de controle usuais, mas desde que não perca nenhum passo, ele sabe onde está.” Para aplicações práticas de montagem, enxames dessas unidades poderiam trabalhar juntos para acelerar o processo, graças ao software de controle desenvolvido por Abdel-Rahman que pode permitir que os robôs coordenem seu trabalho e evitem atrapalhar uns aos outros.
Este tipo de montagem de grandes estruturas a partir de subunidades idênticas usando um sistema robótico simples, muito parecido com uma criança montando um grande castelo com blocos de LEGO, já atraiu o interesse de alguns grandes usuários potenciais, incluindo a NASA, colaboradora do MIT nesta pesquisa, e a empresa aeroespacial europeia Airbus SE, que também ajudou a patrocinar o estudo.
Uma vantagem dessa montagem é que os reparos e a manutenção podem ser realizados facilmente pelo mesmo tipo de processo robótico da montagem inicial. As seções danificadas podem ser desmontadas da estrutura e substituídas por novas, produzindo uma estrutura tão robusta quanto a original. “Desconstruir é tão importante quanto construir”, diz Gershenfeld, e esse processo também pode ser usado para fazer modificações ou melhorias no sistema ao longo do tempo.
“Para uma estação espacial ou um habitat lunar, esses robôs viveriam na estrutura, mantendo-a e reparando-a continuamente”, diz Jenett.
Em última análise, tais sistemas poderiam ser usados para construir edifícios inteiros, especialmente em ambientes difíceis, como no espaço, ou na Lua ou Marte, diz Gershenfeld. Isso poderia eliminar a necessidade de enviar grandes estruturas pré-montadas desde a Terra. Em vez disso, seria possível enviar grandes lotes de pequenas subunidades – ou formá-los a partir de materiais locais, utilizando sistemas que pudessem produzir essas subunidades no seu destino final. “Se você consegue fazer um jato jumbo, você consegue construir um prédio”, diz Gershenfeld.
Sandor Fekete, diretor do Instituto de Sistemas Operacionais e Redes de Computadores da Universidade Técnica de Braunschweig, na Alemanha, que não esteve envolvido neste trabalho, diz: “Materiais digitais ultraleves como (estes) abrem perspectivas surpreendentes para a construção eficiente, complexa , estruturas de grande escala, que são de vital importância em aplicações aeroespaciais.”
Mas a montagem de tais sistemas é um desafio, diz Fekete, que planeia juntar-se à equipa de investigação para um maior desenvolvimento dos sistemas de controlo. “É aqui que o uso de robôs pequenos e simples promete proporcionar o próximo avanço: os robôs não ficam cansados ou entediados, e usar muitos robôs em miniatura parece ser a única maneira de realizar esse trabalho crítico. Este trabalho extremamente original e inteligente de Ben Jennet e colaboradores dá um salto gigante em direção à construção de asas de avião dinamicamente ajustáveis, enormes velas solares ou mesmo habitats espaciais reconfiguráveis.”
No processo, diz Gershenfeld, “sentimos que estamos descobrindo um novo campo de sistemas híbridos de material-robô”.
Referência: “Sistema material-robô para montagem de estruturas celulares discretas” por Benjamin Jenett, Amira Abdel-Rahman, Kenneth Cheung e Neil Gershenfeld, 23 de julho de 2019, Cartas de Robótica e Automação IEEE.
DOI: 10.1109/LRA.2019.2930486